English
EXHIBITION
Industrial
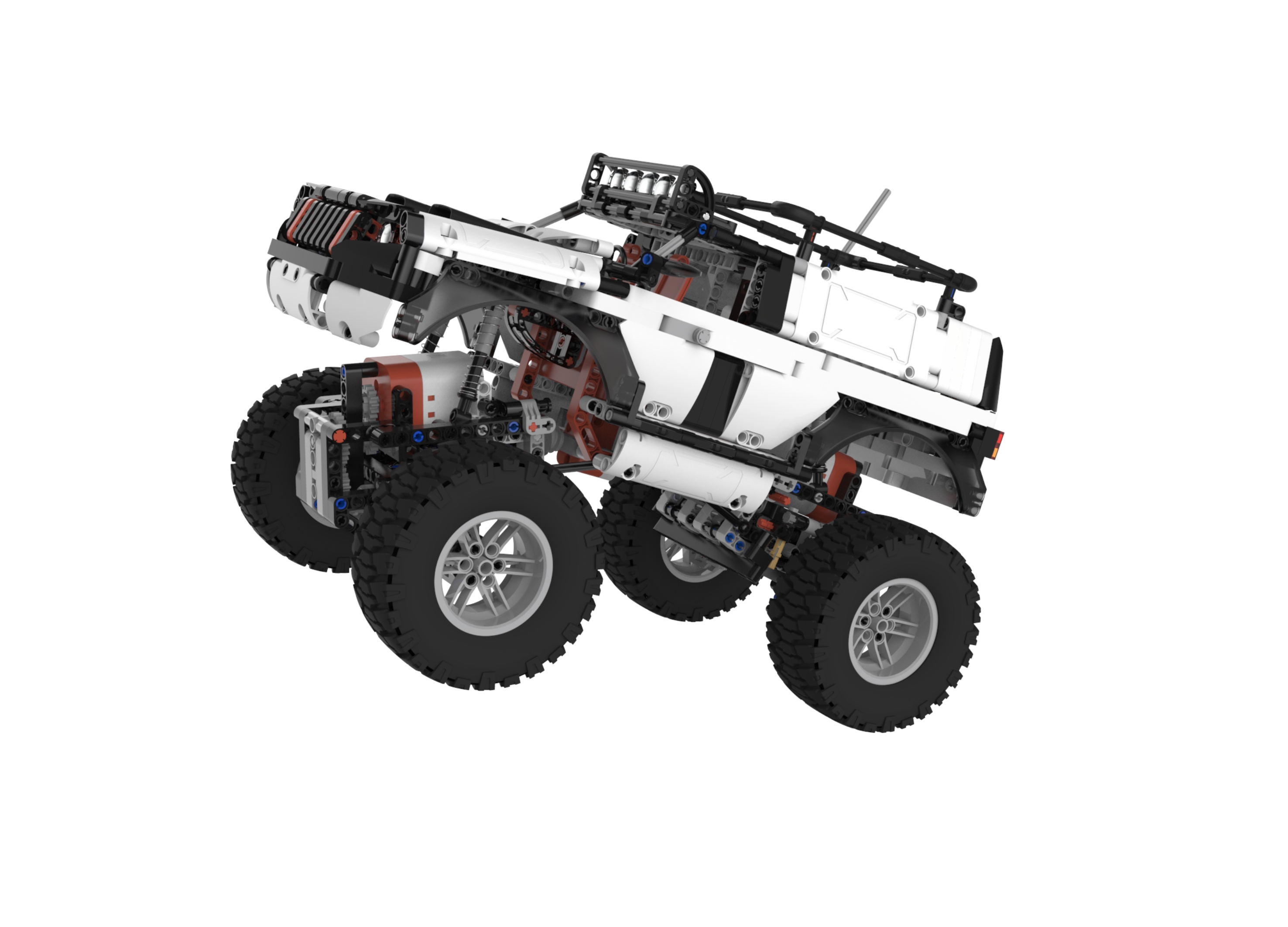
Mi Robot Builder Crawler


| Area | China |
|---|---|
| Year | 2019 |
| Award | WINNER |
| Client | Beijing AIQI Technology Co., LTD. |
| Affiliation | Beijing AIQI Technology Co., LTD. |
| Designer | Yang Zhang, Cong Cao |
| Description(English) | The Crawler also provides a four-wheel independent bumper, which is placed between the body and the tire as a buffer device, mainly to absorb the vibration generated by the vehicle when rolling over the potholed road surface, to support the car body, and in the coordination of bumper, it makes the control more stable. In addition, in order to be able to drive on all lands, the Crawler is equipped with a large sized high-elastic rubber tires. Each wheel is 105mm in size. The controller of four-wheel-drive vehicle can call on sensors in mobile devices, such as TIME, GPS, gyroscope and MIC, etc., which makes its playing methods more diversified. |
| Description(Native) | 智能积木越野四驱车是一款智能遥控类积木玩具,通过千余块积木相互驳接,再以大扭矩电机作为驱动,配合手机或平板电脑即可进行操控,乐趣十足。 智能积木 越野四驱车还提供了四轮独立悬挂避震装置,这个装置是放在车身与轮胎之间的一个缓冲装置,主要是为了吸收车辆在碾压坑洼路面时产生的震动,支撑车体的作用,而且在悬挂避震装置的协同下,还使操控更加稳定。另外,智能积木越野四驱车为了能够在全地形上行驶,还配备了大尺寸高弹橡胶轮胎。每个轮子的尺寸都达到了105mm。在轮胎的制式方面也考量了真实的AT轮胎,在不影响越野性能的基础上,为整个轮胎增加了排水沟壑,这样不管是在沙漠中,还是在泥地中都能够运动自如。智能积木越野四驱车的操控集成到了积木机器人APP中,只需要蓝牙连接,就可以实现移动端操控。在APP中内置了图形化编程,只需用手指拖动模块,并且加以组合,就可以控制智能积木 越野四驱车,即使没有编程基础的人,也能够轻松使用。在智能方面,越野四驱车的主控可以调用移动设备中的传感器,如TIME、GPS、陀螺仪以及MIC等,这样就让它的玩法更加多样了,根据所需传感器的能力,可以实现定时启动、语音操控、陀螺仪行驶等。 |
| Positive Comments |




|
-
The Essence
-
A skiff
-
Vast Luster
-
HARMONY
-
Cresta Galleria
-
Regular Unregular
-
Engild
-
Xi an Metro Line 5
-
Retro Modern
-
Health and Wellness Shelter
-
The Rising Dawn
-
Room With A View












Designed by sketchbooks.co.kr / sketchbook5 board skin