English
EXHIBITION
Industrial
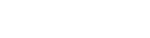
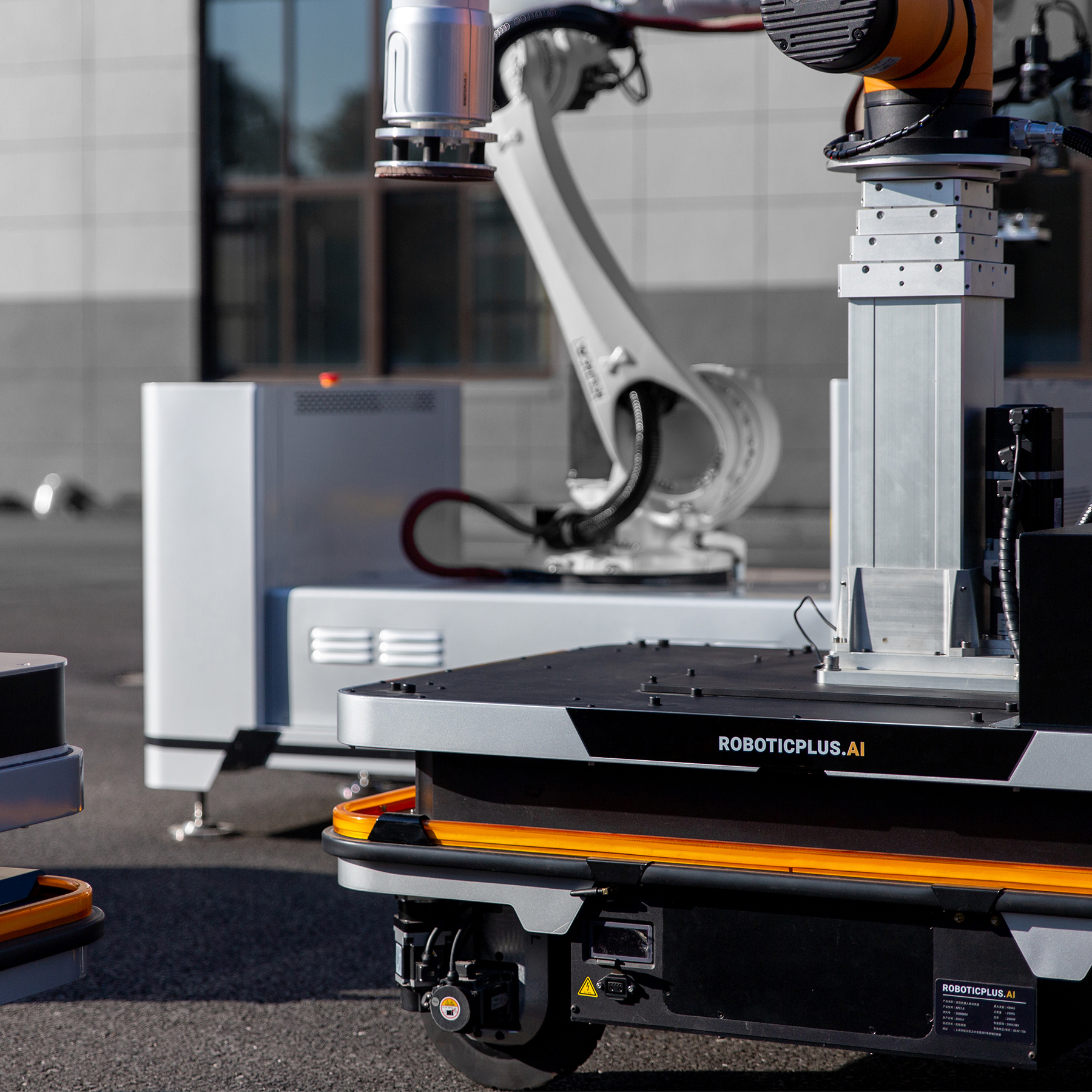
ROBOTICPLUS construction heavy duty chassis

| Area | China |
|---|---|
| Year | 2021 |
| Award | GOLD WINNER |
| Affiliation | Robot |
| Designer | Wufan |
| Description(English) | The equipment uses simultaneous localization and mapping(SLAM) and dual radars to detect obstacles in 360 degrees. It can achieve autonomous positioning in the construction with an accuracy of ±5CM and complete movement modes such as horizontal movement, straight movement, and in-situ rotation. The equipment is equipped with a self-developed modular system. After self-assembly, it can quickly arrange the working position of the medium-sized industrial manipulator within 500kg through the self-adjusting platform. It can also complete aerial work by carrying the lifting platform and the cooperative manipulator. |
| Description(Native) | ROBOTICPLUS建筑载重地盘是专门针对复杂的建筑施工环境设计并优化的平台,它会根据外界复杂环境进行自我行为规划,凭借超强的越障能力和运动性能,帮助人类工人从事危险的施工作业。 ROBOTICPLUS建筑载重地盘使用即时定位与地图构建(SLAM)、双雷达360度检测障碍物,实现在施工场景中可自主定位,保证±5MM的高定位精度和安全性;独特的四舵轮导航算法,实现了自主规划路径、绕障等功能,保证了灵活性与安全性。面对复杂的任务时,AGV内部搭载了自主研发的模块化系统,自主完成快速组装后,可通过自调平台完成500KG以内的中型工业机械臂工作位置的快速布置,也可通过搭载升降系统与协作型机械臂完成高空作业,也可以单独自主的承接物流的任务。底盘的大负载可以满足工厂和工地的多场景化应用。 它具有流畅的外形和清晰的表面,彩色可调指示灯带可完成全方位人机交互。产品表面使用3A环保漆面,整机采用强度高、密度小的航空铝,易散热且稳定性好。骨架主体做防尘防水结构设计,防护等级可达IP67,骨架零件均做氧化耐磨处理;舵轮采用高品质橡胶,低操作噪音,可以完美应对建筑工地恶劣复杂的环境。整机长度仅1.5米、高度仅0.4m,载重最大可达1000kg,骨架零件均作氧化耐磨处理,主体防水防尘,作为人类可靠的助手可以完美应对建筑工地恶劣复杂的施工环境。 |
| Positive Comments |





|
-
The Essence
-
A skiff
-
Vast Luster
-
HARMONY
-
Cresta Galleria
-
Regular Unregular
-
Engild
-
Xi an Metro Line 5
-
Retro Modern
-
Health and Wellness Shelter
-
The Rising Dawn
-
Room With A View












Designed by sketchbooks.co.kr / sketchbook5 board skin